
![]()
![]()
![]()
 US Navy und US Air Force begannen bereits in den 70er Jahren unabhängig voneinander mit der Planung und Entwicklung eines neuen satellitengestützten Funknavigationssystems. Die zwei Projekte wurden aus Kostengründen in den frühen 70er Jahren zusammengelegt. Das neue, nun gemeinsame System
sollte eine weltweite und hochgenaue Standortbestimmung ermöglichen, damit sich Uncle Sams Soldaten nicht mehr verirren. Es erhielt den Namen NAVSTAR Global Positioning System, kurz GPS. Am 21. Februar 1978 wurde der erste GPS Satellit an Bord einer Delta IV Rakete in den Weltraum befördert. Auch wenn GPS bereits 1991 im zweiten Golfkrieg intensiv für militärische Operationen genutzt wurde, so
erreichte das System doch erst am 27.04.1995 seine volle und uneingeschränkte Einsatzfähigkeit.
US Navy und US Air Force begannen bereits in den 70er Jahren unabhängig voneinander mit der Planung und Entwicklung eines neuen satellitengestützten Funknavigationssystems. Die zwei Projekte wurden aus Kostengründen in den frühen 70er Jahren zusammengelegt. Das neue, nun gemeinsame System
sollte eine weltweite und hochgenaue Standortbestimmung ermöglichen, damit sich Uncle Sams Soldaten nicht mehr verirren. Es erhielt den Namen NAVSTAR Global Positioning System, kurz GPS. Am 21. Februar 1978 wurde der erste GPS Satellit an Bord einer Delta IV Rakete in den Weltraum befördert. Auch wenn GPS bereits 1991 im zweiten Golfkrieg intensiv für militärische Operationen genutzt wurde, so
erreichte das System doch erst am 27.04.1995 seine volle und uneingeschränkte Einsatzfähigkeit.
 NAVSTAR GPS wird ausschließlich vom US-Militär betrieben und weiterentwickelt. Es untersteht dem US Space Command (USSPACECOM) in Colorado. Von hier aus werden die gesamten militärischen Aktivitäten der USA im All
kontrolliert und gesteuert. Auch wenn die zivilen Anwendungen inzwischen überwiegen und großes kommerzielles Interesse besteht, so ist und bleibt GPS von seiner ganzen Struktur her doch ein militärisches System.
NAVSTAR GPS wird ausschließlich vom US-Militär betrieben und weiterentwickelt. Es untersteht dem US Space Command (USSPACECOM) in Colorado. Von hier aus werden die gesamten militärischen Aktivitäten der USA im All
kontrolliert und gesteuert. Auch wenn die zivilen Anwendungen inzwischen überwiegen und großes kommerzielles Interesse besteht, so ist und bleibt GPS von seiner ganzen Struktur her doch ein militärisches System.
4.1. GPS Grundlagen
4.1.1. Segmente
GPS besteht aus insgesamt drei Segmenten: dem Raumsegment, dem Kontrollsegment und dem Benutzersegment.
 4.1.1.1. Raumsegment
4.1.1.1. Raumsegment
Das Raumsegment besteht aus insgesamt 24 Satelliten auf sechs Umlaufbahnen (vier Satelliten pro Bahn). Jeder Satellit umrundet in einer Höhe von 20.200 km alle 12 Stunden die Erde. Die Umlaufbahnen sind so angeordnet, dass von jedem Punkt der Erde Sichtkontakt zu mindestens 4-6 Satelliten besteht. Jeder Satellit sendet auf zwei Frequenzen im UHF-Bereich (L-Band), L1=1575,42 MHz und L2=1227,60 MHz. Mit einer Leistung von 50 W werden ständig die jeweiligen Orbitaldaten, eine sich periodisch wiederholende Zahlensequenz und die exakte, per Bordatomuhr ermittelte Uhrzeit übertragen.
 Zur Zeit (2001) werden 12 Satelliten der Serie IIF-lite gebaut, deren Start für die Jahre 2004 - 2008 vorgesehen ist. Diese Satelliten werden neben den Signalen auf den Frequenzen L1 und L2 ein weiteres zivil nutzbares Signal auf L5=1176,45 MHz
abgeben. Weitere Satelliten der Serie GPS III werden ab 2007 ältere Satelliten ersetzen. Es ist geplant, dass das L5 Signal ab 2010 bei 24 Satelliten zur Verfügung stehen wird. Spezifikationsänderungen können jedoch zu Verzögerungen führen.
Zur Zeit (2001) werden 12 Satelliten der Serie IIF-lite gebaut, deren Start für die Jahre 2004 - 2008 vorgesehen ist. Diese Satelliten werden neben den Signalen auf den Frequenzen L1 und L2 ein weiteres zivil nutzbares Signal auf L5=1176,45 MHz
abgeben. Weitere Satelliten der Serie GPS III werden ab 2007 ältere Satelliten ersetzen. Es ist geplant, dass das L5 Signal ab 2010 bei 24 Satelliten zur Verfügung stehen wird. Spezifikationsänderungen können jedoch zu Verzögerungen führen.
Jeder Satellit verfügt über Hilfsraketen, mit denen die Umlaufbahn gegebenenfalls korrigiert werden kann. Die Stromversorgung erfolgt über Solarpaneels bzw. Batterien, wenn der Satellit sich im Erdschatten befindet. Ein Satellit hat eine Nutzungsdauer von ca. 10 Jahren. Dann muss er ersetzt werden, d.h. ein neuer wird hochgeschossen. Den alten lässt man dann kontrolliert verglühen. Die US Streitkräfte sind derzeit dabei, ihre gesamte Satellitenflotte durch neuere Modelle zu ersetzen. Daher befinden sich im Moment (Dezember 2001) insgesamt 29 Satelliten im All.
4.1.1.2. Kontrollsegment
 Das Kontrollsegment besteht aus dem US Space Command in Colorado Springs, fünf Kontrollstationen in Colorado Springs, auf Hawaii, Kwajalein im Südpazifik, Diego Garcia im Indischen Ozean und Ascension im Südatlantik sowie drei Bodenantennen auf Ascension, Diego Garcia und Kwajalein.
Von den Bodenstationen aus werden die Satelliten beobachtet und kontrolliert. Gegebenfalls werden von den Bodenstationen aus über die Bodenantennen die Bahnen der Satelliten korrigiert bzw. Updates der Informationsdaten des Satelliten durchgeführt. Man beachte, dass sämtliche Bodenstationen sich auf US oder britischem Hoheitsgebiet befinden.
Das Kontrollsegment besteht aus dem US Space Command in Colorado Springs, fünf Kontrollstationen in Colorado Springs, auf Hawaii, Kwajalein im Südpazifik, Diego Garcia im Indischen Ozean und Ascension im Südatlantik sowie drei Bodenantennen auf Ascension, Diego Garcia und Kwajalein.
Von den Bodenstationen aus werden die Satelliten beobachtet und kontrolliert. Gegebenfalls werden von den Bodenstationen aus über die Bodenantennen die Bahnen der Satelliten korrigiert bzw. Updates der Informationsdaten des Satelliten durchgeführt. Man beachte, dass sämtliche Bodenstationen sich auf US oder britischem Hoheitsgebiet befinden.
![]() 4.1.1.3. Benutzersegment
4.1.1.3. Benutzersegment
Das Benutzersegment sind die Endgeräte, d.h. die von uns benutzten GPS-Empfänger. Hierbei handelt es sich um reine Empfangsgeräte, die aus den vom Satelliten ausgestrahlten Signalen (Bahndaten, Uhrzeit, Zahlensequenz) ständig und an jedem Ort ihre momentane Position errechnen.
|
|
4.1.2. Funktion
 Das GPS-Gerät empfängt von mehreren Satelliten Daten zur jeweiligen Orbitalbahn, die exakte Uhrzeit sowie eine periodisch sich wiederholende Zahlensequenz. Der GPS Empfänger ermittelt hieraus die Laufzeit, die das Signal vom Satelliten zum
Empfänger benötigt. Hierfür wird die empfangene Zahlensequenz des Satelliten mit der im GPS-Empfänger ebenfalls synchron zum Satelliten ablaufenden Zahlensequenz verglichen. Durch Ermittlung des Laufzeitunterschieds zwischen empfangener Sequenz und der im Empfänger laufenden Sequenz wird die Laufzeit des Signals ermittelt. Aus der bekannten Ausbreitungsgeschwindigkeit c = 300m/ms und der
ermittelten Laufzeit t des Signals lässt sich die Entfernung R zum Satelliten berechnen:
Das GPS-Gerät empfängt von mehreren Satelliten Daten zur jeweiligen Orbitalbahn, die exakte Uhrzeit sowie eine periodisch sich wiederholende Zahlensequenz. Der GPS Empfänger ermittelt hieraus die Laufzeit, die das Signal vom Satelliten zum
Empfänger benötigt. Hierfür wird die empfangene Zahlensequenz des Satelliten mit der im GPS-Empfänger ebenfalls synchron zum Satelliten ablaufenden Zahlensequenz verglichen. Durch Ermittlung des Laufzeitunterschieds zwischen empfangener Sequenz und der im Empfänger laufenden Sequenz wird die Laufzeit des Signals ermittelt. Aus der bekannten Ausbreitungsgeschwindigkeit c = 300m/ms und der
ermittelten Laufzeit t des Signals lässt sich die Entfernung R zum Satelliten berechnen:
R = c x t
Aus der ermittelten Entfernung R ergibt sich eine Kugeloberfläche im Raum, in dessen Mittelpunkt sich der Satellit befindet. Auf der Kugeloberfläche muss sich dann der GPS-Empfänger befinden. Auf der Erdoberfläche ergibt sich bei nur einem Satelliten somit ein Kreis von möglichen Positionen des Empfängers. Um meine Position zu ermitteln benötige ich somit die Entfernungen zu mindestens drei Satelliten, d.h. drei Kugeln, deren Radien sich alle in einem Punkt schneiden. Hieraus wird die dreidimensionale Position errechnet. Dass, wie oft behauptet, zur Ermittlung der Höhe mehr als drei Satelliten notwendig sind, ist blanker Unsinn! Zusätzliche Satelliten erhöhen aber die Genauigkeit.
4.1.3. Genauigkeit
4.1.3.1. Temporäre Fehler
Die Genauigkeit meiner ermittelten Position hängt maßgeblich von der Anzahl der zur Verfügung stehenden Satelliten ab. Um ein genaues Signal empfangen zu können, muss ungehinderter "Sichtkontakt" zum Satelliten bestehen. Die UHF-Funkwellen können zwar dünne Hindernisse, z.B. Glas, Textilien und Blätter durchdringen, stehen aber Gebäude im Weg oder befinde ich mich in einer tiefen Schlucht oder dichtem Wald, so erreichen mich u.U. zu wenig oder keine Signale.
 Ebenso wie bei einer Kreuzpeilung mit dem Kompass beeinflusst bei der Positionsbestimmung per GPS die Lage der Orientierungspunkte, i.d.F. die Konstellation der Satelliten die Messgenauigkeit meines Empfängers. Wenn die Satelliten dicht beieinander liegen oder gar auf einer Linie,
so ist eine Positionsbestimmung sehr ungenau oder unmöglich. Auch wenn das GPS-Gerät die empfangenen Signale bei ungünstiger Konstellation so gerade noch nutzen kann, so ist dann doch leicht ein Fehler >100m möglich.
Ebenso wie bei einer Kreuzpeilung mit dem Kompass beeinflusst bei der Positionsbestimmung per GPS die Lage der Orientierungspunkte, i.d.F. die Konstellation der Satelliten die Messgenauigkeit meines Empfängers. Wenn die Satelliten dicht beieinander liegen oder gar auf einer Linie,
so ist eine Positionsbestimmung sehr ungenau oder unmöglich. Auch wenn das GPS-Gerät die empfangenen Signale bei ungünstiger Konstellation so gerade noch nutzen kann, so ist dann doch leicht ein Fehler >100m möglich.
Insgesamt umkreisen 24 Satelliten den Globus von denen sich normalerweise sechs über dem Horizont befinden. Werden diese Satelliten dann ganz oder teilweise durch Hindernisse abgedeckt so kommt es zu ungenauen Positionen. Da die Satelliten ihre Position auf ihrer Orbitalbahn aber laufend verändern, ist dieses Problem nur von temporärer Dauer.
4.1.3.2 Entfernungsfehler
Ein ständiger Fehler ergibt sich aus Zeitdifferenzen zwischen den hochgenauen Atomuhren an Bord der Satelliten und der weniger genauen Quarzuhr im Empfänger. Habe ich bei fest eingebauten Empfängern in Schiffen oder Flugzeugen noch die Möglichkeit, sehr genaue Uhrwerke einzubauen und so den Fehler möglichst klein zu halten, so ist dies bei einem 200g leichten Handgerät ungleich schwerer. Aus diesem Zeitfehler zwischen Satellitenuhr und Empfängeruhr ergibt sich ein Entfernungsfehler, der sog. user clock bias:
 D Rucb = c x D tucb
D Rucb = c x D tucb
Ein Zeitmessfehler D tucb von 1 Millionstel Sekunde führt bereits zu einem Entfernungsfehler D Rucb von ca. 30 m! Das Gerät ermittelt also nicht die tatsächliche Entfernung Ri zum Satelliten, sondern einen fehlerhaften Wert, die sog. Pseudo Range Ri', die sich mit folgender Gleichung darstellen lässt:
Ri' = Ri + c x D tucb
Ähnlich wie bei Kreuzpeilungen von mehr als zwei Landmarken mit dem Kompass erhalte ich dann keinen exakten Schnittpunkt, sondern ein Dreieck, bzw. ein Vieleck (Raumsegment), in dem meine Position liegt. Je größer der Fehler desto größer ist mein Raumsegment. Da der Messfehler durch die Gangungenauigkeit der Empfängeruhr jedoch bei allen Entfernungsmessungen gleich groß ist, kann der Fehler durch Mittelwertberechnungen reduziert werden. Um diesen Fehler auszugleichen, sind jedoch mehr als drei Satelliten erforderlich. Aus den zusätzlichen Pseudo Ranges Ri' werden in Kombination der Pseudo Ranges Ri' der anderen drei Satelliten weitere ungenaue Positionen ermittelt. Hieraus kann dann durch Mittelwertbildung die Position dann bis auf wenige Meter genau bestimmt werden.
4.1.3.3. Selective Availability
Wie bereits erwähnt senden die GPS-Satelliten auf zwei Frequenzen: L1 und L2. Die GPS-Satelliten senden zwei unterschiedliche Codes. Der zivil nutzbare C/A (coarse aquisition) Code wird auf der Frequenz L1 zur Verfügung gestellt. Er ist ohne weitere Maßnahmen und unentgeltlich weltweit zu empfangen. Der C/A-Code wurde bis zum 02.05.2000 von den US-Behörden künstlich verfälscht. Die aus dem verfälschten C/A-Code ermittelten Positionen erreichten eine Genauigkeit von 90-100m. Diese Verfälschung, die sogenannte S/A (selective availability) wurde am 02.05.2000 per US-Regierungsbeschluß aufgehoben. Seitdem erreicht man mit dem C/A-Code Genauigkeiten von 6-10m. Die S/A kann jedoch jederzeit wieder aktiviert werden wenn die US Regierung es für notwendig hält.
4.1.3.4. Beugungsfehler
Das militärisch genutzte Signal, der sogenannte P/Y-Code wird sowohl auf L1 als auch auf L2 zur Verfügung gestellt. Das Signal wird mittels Chiffriermaschinen und Kryptocode verschlüsselt und kann nur mit entsprechenden Dechiffriermaschinen und dem richtigen Code empfangen werden. Militärische Einfrequenz-GPS-Geräte empfangen nur den P/Y-Code auf L1. Sie erreichen eine Genauigkeit von
6-10m, genau wie beim C/A-Code. Zweifrequenzempfänger empfangen ein und denselben P/Y-Code auf zwei verschiedenen Frequenzen (L1 und L2) und erreichen so eine Genauigkeit von 0,8-1m. Warum das?
Zweifrequenzempfänger empfangen ein und denselben P/Y-Code auf zwei verschiedenen Frequenzen (L1 und L2) und erreichen so eine Genauigkeit von 0,8-1m. Warum das?
Funkwellen breiten sich wie alle elektromagnetischen Wellen im Vakuum geradlinig und mit konstanter Geschwindigkeit, d.h. mit Lichtgeschwindigkeit aus. Bei Eintritt der Funkwellen in die Atmosphäre treten jedoch Störungen auf. Die Funkwellen werden je nach atmosphärischen Bedingungen abgelenkt. Der aus diesen atmosphärischen Störungen resultierende Fehler ist u.a. abhängig von der Frequenz der Funkwellen, d.h. unterschiedliche Frequenzen werden unterschiedlich stark abgelenkt. Der Fehler wird zwar mittels eines statistisch ermittelten Korrekturalgorithmus minimiert aber nicht vollständig eliminiert. Führe ich nun zwei Korrekturen statt nur einer durch, so erreiche ich natürlich auch eine höhere Genauigkeit. An dem Korrekturalgorithmus für atmosphärische Störungen wird ständig gearbeitet. Neue Algorithmen werden als Softwareupdate bei jedem Satelliten regelmäßig eingespielt.
4.2. GPS Empfänger
Die heute auf dem Markt verfügbaren tragbaren GPS Empfänger sind inzwischen so klein wie ein Mobiltelefon und wiegen zwischen 150 und 350 g. Am Motorrad kann man natürlich auch fest installierte Aufbaugeräte verwenden. Da ich GPS jedoch genau wie den Kompass als persönliche und nicht als Motorradausstattung betrachte, bevorzuge ich tragbare Geräte. Man will sich ja auch mal von seinem Fahrzeug entfernen und auch abseits der Straße nicht auf dieses komfortable Navigationshilfsmittel verzichten müssen. GPS Geräte mit geführter Straßennavigation sind dementsprechend auch nicht Gegenstand dieser Betrachtung.
Tragbare GPS Empfänger verwenden als Stromquelle normalerweise zwei oder vier 1,5 V Mignonzellen. Dies reicht für einen Dauerbetrieb von 12 - 36 Stunden. Akkus können auch verwendet werden. Da Akkuzellen jedoch nur 1,2 V Spannung haben, sind sie schneller aufgebraucht. Zudem fällt die Spannung im Gegensatz zu Batterien schlagartig ab und das Gerät versagt den Dienst. Das passiert naturgemäß immer dann wenn man es gerade am allerwenigsten brauchen kann. Am Motorrad kann das Gerät über das Bordnetz versorgt werden. Da viele Geräte jedoch keine 12 V vertragen, muss vorher ein Spannungswandler installiert werden.
Die Preise beginnen bei etwa 120 Euro und reichen bis etwa 600 Euro. Die Grundfunktionen sind bei fast allen Geräten weitgehend die gleichen. Die Preisunterschiede resultieren hauptsächlich aus den verschiedensten Zusatzfunktionen. Das können inzwischen integrierte elektronische Karten, ein elektronischer Kompass oder ein barometrischer Höhenmesser sein. Inzwischen gibt es auch
Mobiltelefone mit integriertem GPS. Da der Hauptzweck dieser Geräte aber das Telefonieren ist, sind die GPS Funktionen ziemlich dürftig.
4.2.1. Einfache GPS Empfänger
Der Hauptzweck eines GPS Gerätes ist, seinem Benutzer die aktuelle Position mitzuteilen. Hierzu errechnet das Gerät aus den Satellitensignalen ständig die Position, die dann in verschiedenen Formaten dargestellt werden kann. 
 Standardeinstellung ist die Darstellung der Position als geografische Koordinate im WGS84.
Standardeinstellung ist die Darstellung der Position als geografische Koordinate im WGS84.
Darüber hinaus können mit der aktuellen Position und gespeicherten Positionen eine Vielzahl von Berechnungen angestellt werden, die als zusätzliche Information angezeigt werden können. Gerade diese Funktionen machen das GPS Gerät für den Privatanwender so vielseitig. Hierzu gehören:
Ermittlung von Richtung und Entfernung zu einem vorab gespeicherten Wegpunkt (WP)
| Ermittlung der momentanen Richtung und Geschwindigkeit
| Ermittlung der geschätzten Ankunftszeit (ETA) am Wegpunkt
| Zusammenfassen von Wegpunkten zu Routen
| Aufzeichnung der zurückgelegten Strecke (tracks)
| Berechnung von Sonnenauf- und -untergang | |
4.2.2. GPS-Geräte mit integrierter elektronischer Karte
 Inzwischen sind eine Vielzahl von Modellen mit integrierten elektronischen Karten verfügbar. Auf der Anzeige ist meine Position dann mit einer elektronischen Karte hinterlegt. Hierbei handelt es sich um sog. Vektorkarten. Die Detailfülle lässt sich am ehesten mit einer
einfachen Straßenkarten vergleichen. Bereits die Eifel ist auf diesen Karten weitgehend "Terrra Incognita". Kleine Straßen sind nicht abgebildet. Bisweilen sind kleine Ortschaften abgebildet, größere dagegen fehlen völlig. Nach Gewässern, Höhenlinien u.ä. braucht man gar nicht erst zu suchen. Hinsichtlich Genauigkeit können diese Karten daher nicht mit gedruckten topografischen
Karten oder elektronischen Rasterkarten mithalten. Außerdem sind die Displays der meisten Geräte recht klein, in schwarz/weiß und die Auflösung ist gering. Elektronische Karten für tragbare GPS Geräten taugen bestenfalls zur groben Orientierung. Diese Lösung ist daher kein Ersatz für eine topografische Karte!
Inzwischen sind eine Vielzahl von Modellen mit integrierten elektronischen Karten verfügbar. Auf der Anzeige ist meine Position dann mit einer elektronischen Karte hinterlegt. Hierbei handelt es sich um sog. Vektorkarten. Die Detailfülle lässt sich am ehesten mit einer
einfachen Straßenkarten vergleichen. Bereits die Eifel ist auf diesen Karten weitgehend "Terrra Incognita". Kleine Straßen sind nicht abgebildet. Bisweilen sind kleine Ortschaften abgebildet, größere dagegen fehlen völlig. Nach Gewässern, Höhenlinien u.ä. braucht man gar nicht erst zu suchen. Hinsichtlich Genauigkeit können diese Karten daher nicht mit gedruckten topografischen
Karten oder elektronischen Rasterkarten mithalten. Außerdem sind die Displays der meisten Geräte recht klein, in schwarz/weiß und die Auflösung ist gering. Elektronische Karten für tragbare GPS Geräten taugen bestenfalls zur groben Orientierung. Diese Lösung ist daher kein Ersatz für eine topografische Karte!
Geräte mit elektronischen Rasterkarten sind leider noch sehr teuer. Ihre Anwendung ist daher auf den professionellen Bereich oder auf Sonderanwendungen, z.B. die Seefahrt oder die Fliegerei beschränkt. Da elektronische Speicherkapazität aber immer kleiner und (wichtig) immer billiger wird, ist es wohl nur eine Frage der Zeit bis elektronische Rasterkarten auch bei Outdoor-GPS-Geräten Verwendung finden und man so ein wirklich brauchbares moving-map-display im Taschenformat zu einem reellen Preis erhält. Lösungen mit Laptops und GPS-Empfänger sind aber gut brauchbar. Das Problem ist halt der Preis und der Platzbedarf.
4.2.3. GPS-Geräte mit integriertem elektronischen Kompass
Das GPS-Gerät hat zwei Möglichkeiten aus den empfangenen Satellitendaten die Himmelsrichtung zu ermitteln:
Aus der Bewegung, d.h. das Gerät berechnet den Kurs aus vorheriger Position und aktueller Position
| Durch Ermittlung der Richtung von der aktuellen Position zu einem vorgegebenen Wegpunkt | |
Habe ich keine vorgegebenen Wegpunkte und bewege ich mich nicht, so ist das Gerät nicht in der Lage, die Himmelsrichtung zu ermitteln. Ist in dem Gerät jedoch ein elektronischer Kompass integriert, so kann die Himmelsrichtung wie mit einem herkömmlichen Magnetkompass auch im Stand und ohne vorgegebenen Wegpunkt festgestellt werden.
Der im Gerät eingebaute Kompass ist ein Magnetkompass und ermittelt seine Werte anhand des Magnetfelds der Erde. Vor der ersten Benutzung, nach Wechsel der Batterie und nach zurücklegen größerer Distanzen bei ausgeschaltetem Gerät, z.B. nach Flügen, muss der Kompass neu kalibriert werden. Dies geschieht, indem man das Gerät im Kalibriermodus einmal langsam um 360o dreht. Das Gerät ist nun kalibriert und zeigt mir auf etwa +/- 2o genau die Nordrichtung an. Dies ist serienmäßig magnetisch Nord, kann aber wahlweise auch geografisch Nord, Gitter Nord oder eine benutzerspezifische Einstellungen sein.
Benutze ich mein GPS-Gerät mit integriertem elektronischen Kompass zusammen mit einer topografischen Karte, so habe ich die Möglichkeit, meine Karte wie mit einem herkömmlichen Magnetkompass einzunorden. Die Nordrichtung des Kompasses kann am Gerät eingestellt werden. Voreinstellung ist magnetisch Nord. Benutze ich nun Gitter Nord, so entfällt bei der Kartenarbeit die mitunter lästige rechnerische Berücksichtigung der Meridiankonvergenz und der Abweichung. Dies erledigt das Gerät dann für mich.
 Ein interessantes Ausstattungsdetail ist die Möglichkeit, mit dem Gerät nicht nur wie mit einem herkömmlichen Peilkompass Peilungen vorzunehmen, sondern von meinen aktuellen Standort auch Kurse sowie Kurs und Entfernung abstecken zu können. Beim Absetzen eines Kurses (set course)
wird eine Landmarke angepeilt und die Richtung bestimmt. Ich kann dann entlang der festgehaltenen Peilung marschieren. Auf dem Display zeigt mir eine Grafik, ob ich mich zu weit links, rechts oder genau auf Kurs befinde. Die Abweichungsdistanz wird als Wert angezeigt.
Ein interessantes Ausstattungsdetail ist die Möglichkeit, mit dem Gerät nicht nur wie mit einem herkömmlichen Peilkompass Peilungen vorzunehmen, sondern von meinen aktuellen Standort auch Kurse sowie Kurs und Entfernung abstecken zu können. Beim Absetzen eines Kurses (set course)
wird eine Landmarke angepeilt und die Richtung bestimmt. Ich kann dann entlang der festgehaltenen Peilung marschieren. Auf dem Display zeigt mir eine Grafik, ob ich mich zu weit links, rechts oder genau auf Kurs befinde. Die Abweichungsdistanz wird als Wert angezeigt.
 Zusätzlich kann ich einen abgesetzten Kurs um eine Entfernung ergänzen. Durch projizieren eines Wegpunktes in Richtung des abgesetzten Kurses (sight'n go) erhalte ich Kurs und Entfernung. Am Ende dieser Strecke wird rechnerisch ein Wegpunkt erzeugt. Das Gerät zeigt
dann Kurs und Entfernung zum Wegpunkt. Beide Funktionen können unter bestimmten Bedingungen, z.B. einer Wanderung über einen Gletscher bei Nebel oder dem Queren eines Sees mit dem Paddelboot sehr nützlich sein.
Zusätzlich kann ich einen abgesetzten Kurs um eine Entfernung ergänzen. Durch projizieren eines Wegpunktes in Richtung des abgesetzten Kurses (sight'n go) erhalte ich Kurs und Entfernung. Am Ende dieser Strecke wird rechnerisch ein Wegpunkt erzeugt. Das Gerät zeigt
dann Kurs und Entfernung zum Wegpunkt. Beide Funktionen können unter bestimmten Bedingungen, z.B. einer Wanderung über einen Gletscher bei Nebel oder dem Queren eines Sees mit dem Paddelboot sehr nützlich sein.
Am Motorrad ist ein im GPS-Gerät integrierte Magnetkompass jedoch von geringem Nutzen. Der Grund sind die durch das Motorrad verursachten Störungen des Erdmagnetfeldes (Deviation). Die Deviation kann nicht am Gerät kompensiert werden. Da die Ablenkung abhängig ist vom Kurs ist das Erstellen einer Deviationstabelle sehr zeitaufwendig und steht in keinem Verhältnis zum Nutzen. Theoretisch kann ich den Kompass mitsamt dem Motorrad neu kalibrieren und die Deviation so kompensieren. Praktisch gestaltet sich dieses Vorhaben aber schwierig. Zudem wird bei Fahrt des Motorrads der Kurs höchst genau aus den Satellitendaten ermittelt. Für klassische Karten- und Kompassarbeiten im Stand und abseits vom Motorrad (wegen der Deviation!) empfiehlt sich die Benutzung eines separaten Peilkompasses. Er ist klein, leicht und muss nicht extra vom Motorrad demontiert werden. Auf Reisen, wo man auf einen Kompass wirklich nicht verzichten kann, z.B. in der Sahara gibt es zu einem guten, von Stromquellen unabhängigen Peilkompass sowieso keine Alternative.
4.2.4. GPS-Geräte mit integriertem barometrischem Höhenmesser
Der GPS-Empfänger berechnet aus den empfangenen Satellitensignalen eine dreidimensionale Positionsangabe, d.h. eine Koordinate und die Höhe. Zu Zeiten der künstlichen Verschlechterung des zivilen Satellitensignals (selective availability - SA) unterlag dieser Höhenwert großen Schwankungen. Mit dem Abschalten der SA ist dieser Höhenwert endlich zu einer halbwegs brauchbaren Richtgröße geworden. Die Schwankungen sind aber immer noch beträchtlich. Zusätzlich ist zu beachten, dass sich die anhand von Satellitendaten ermittelten Höhenwerte auf das am Gerät eingestellte Bezugsdatum und nicht auf Normal Null (NN) beziehen. Um die Informationen, die mir eine topografische Karte in Form von Höhenlinien und Höhenangaben bietet wirklich nutzen zu können, benötige ich einen präzisen Höhenmesser.
 Einige Geräte auf dem Markt, z.B. Garmin eTrex Summit und Vista, Silva Multi Navigator haben inzwischen einen barometrischen Höhenmesser integriert. Dieser ermittelt auf Basis des Luftdrucks die Höhe. Da sich das Wetter und damit der Luftdruck ständig ändert, ist zur Erhöhung der
Genauigkeit jede Gelegenheit zur Kalibrierung des Höhenmessers zu nutzen. Dafür bieten sich für Alpentourer besonders Pässe an. Sowohl in der Karte als auch auf Hinweisschildern ist die genaue Höhe über NN vermerkt. Entsprechend genau kalibriert zeigt das Gerät die Höhe erstaunlich genau (+/- 3 m) an. Mit diesem zusätzlichen vertikalen Wert und einer aussagekräftigen Karte bin ich nun in
der Lage, eine präzisere horizontale Positionsbestimmung durchzuführen.
Einige Geräte auf dem Markt, z.B. Garmin eTrex Summit und Vista, Silva Multi Navigator haben inzwischen einen barometrischen Höhenmesser integriert. Dieser ermittelt auf Basis des Luftdrucks die Höhe. Da sich das Wetter und damit der Luftdruck ständig ändert, ist zur Erhöhung der
Genauigkeit jede Gelegenheit zur Kalibrierung des Höhenmessers zu nutzen. Dafür bieten sich für Alpentourer besonders Pässe an. Sowohl in der Karte als auch auf Hinweisschildern ist die genaue Höhe über NN vermerkt. Entsprechend genau kalibriert zeigt das Gerät die Höhe erstaunlich genau (+/- 3 m) an. Mit diesem zusätzlichen vertikalen Wert und einer aussagekräftigen Karte bin ich nun in
der Lage, eine präzisere horizontale Positionsbestimmung durchzuführen.
Die Garmin Geräte beziehen den aus den Satellitendaten ermittelten Höhenwert zusätzlich in die Kalkulation mit ein. Diese Option lässt sich aber auch abschalten. Die Höhe wird dann allein aus dem barometrischen Luftdruck ermittelt. Bei eingeschalteter Option werden fehlerhafte Höhen, hervorgerufen durch starke Luftdruckschwankungen, z.B. bei Wetterstürzen, weitgehend ausgeglichen.
Quasi als Nebenprodukt bieten die Garmin Geräte die Möglichkeit, die Luftdruckentwicklung der Aufzeichnungsperiode als Kurve anzuzeigen. Auf diese Weise erhält der Anwender zusätzlich nützliche Hinweise zur Wetterentwicklung. Ich habe so eine zusätzliche Informationsquelle, um z.B. einen drohenden Wettersturz rechtzeitig zu erkennen. Insbesondere auf Bergtouren, egal ob motorisiert oder zu Fuß, möchte ich dieses sicherheitsrelevante Detail inzwischen nicht mehr missen.
4.3. Arbeiten mit GPS
4.3.1. Systemeinstellungen
Im Gerät sind eine ganze Reihe von Systemeinstellungen serienmäßig vorgenommen worden. Diese können den individuellen Bedürfnissen angepaßt werden. Man muss sich daher vor der Tour Gedanken darüber machen was man braucht und wie ich das Gerät an meine Bedürfnisse anpasse.
4.3.1.1. Koordinatensystem
Bei Benutzung des Gerätes mit einer Karte muss das Positionsformat des Gerätes mit dem Koordinatengitter der benutzten Karte übereinstimmen. Ansonsten sind unliebsame Überraschungen vorprogrammiert. Standardeinstellung im GPS-Gerät sind geografische Koordinaten in Grad (o), Minuten ('), Sekunden (") und Zehntelsekunden. Bei der Orientierung an Land mit Karte und GPS sind geodätische Koordinaten meistens praktischer. Beim Kauf des Gerätes ist daher darauf zu achten, dass am Gerät das Format (position format) wie gewünscht geändert werden kann. Da z.B. in Deutschland die offiziellen topografischen Karten über ein Gauß-Krüger-Gitter (German Grid) aufweisen, sollte das Gerät über eine entsprechende Einstellmöglichkeit verfügen.
Die Vermessungsbehörden der meisten europäischen Länder verwenden eigene Koordinatensysteme, die sich in den jeweiligen Karten finden lassen. Auch wenn man sich inzwischen auf das UTM System geeinigt hat, so wird die Umstellung doch noch ein paar Jahre in Anspruch nehmen. Angaben zum verwendeten Koordinatensystem sind am Kartenrand aufgedruckt.
Sollte das gewünschte Gitter nicht verfügbar sein, so besteht bei den meisten Geräten zusätzlich die Möglichkeit, ein Koordinatensystem selbst zu definieren (user grid). Richtig programmiert kann man dann z.B. sein GPS-Gerät problemlos mit Karten des ehemaligen Warschauer Pakts, z.B. der DDR und mit den bei Saharafahrern beliebten russischen Generalstabskarten verwenden. Diese benutzen das S42/83 Koordinatengitter mit Meridianstreifen von 6o Breite. Die Zonen werden wie beim Gauß-Krüger-Gitter beginnend bei 0o Länge nach Osten durchnummeriert. Die Nummer des Meridianstreifens ist Bestandteil des Ostwerts.
Hierzu werden am Gerät unter user grid folgende Einstellungen gemacht:
| Longitude origin: | E 009o 00.000' |
| Scale: | 1.000000 mt |
| False E: | 2500000.0 mt |
| False N: | 0.0 mt |
Das Gerät zeigt jetzt S42/83 Koordinaten mit Bezug auf den 2. Hauptmeridian (009o E) an. Um Koordinaten in anderen S42/83 Meridianstreifen korrekt anzuzeigen müssen die Einstellungen des Bezugsmeridians (longitude origin) entsprechend geändert werden.
4.3.1.2. Geodätisches Datum
Im direkten Zusammenhang mit dem verwendeten Koordinatensystem steht das verwendete Bezugssystem, das sog. geodätische Datum. Hierbei ist zu beachten, dass ein und dasselbe Koordinatensystem durchaus mit verschiedenen Bezugssystemen verwendet werden kann. So verfügen die neusten militärischen Karten über ein UTM-Gitter im WGS84/ETRS89, ältere jedoch noch über ein UTM-Gitter im ED50.
Das GPS Gerät verfügt daher nicht nur über eine Möglichkeit zur Einstellung des Positionsformats, sondern auch zur Änderung des verwendeten geodätischen Datums (map datum). Angaben zum verwendeten Datum sind am Kartenrand aufgedruckt. Die Standardeinstellung des Gerätes ist das WGS84. Unter "setup" - "navigation" - "map datum" sind eine Unzahl von weiteren map datums verfügbar. Sollte sich der erforderliche Referenzellipsoid dann doch nicht darunter befinden, so kann man unter "user datum" sein eigenes Bezugssystem definieren. Um z.B. das Krassowski-Ellipsoid zu bestimmen, müssen die Abweichungen gegenüber WGS84 eingegeben werden. Am Gerät werden dann unter "user datum" folgende Einstellungen gemacht:
| (WGS84 - local) | |
| DX: | 28 mt |
| DY: | -130 mt |
| DZ: | -95 mt |
| DA: | -108 mt |
| DF: | 0.0048087 |
Das Gerät zeigt jetzt Koordinaten unter Bezug auf den Krassowski-Ellipsoiden mit dem Bezugspunkt Pulkowo 1942. In Verbindung mit dem entsprechenden Koordinatensystem (S42/83) kann man jetzt die russischen Militärkarten verwenden.
Die Abweichungen zwischen einem beliebigen Bezugssystem und WGS84 können im Internet, u.a. auf der Homepage der National Imagery and Mapping Agency (NIMA), der Vermessungsbehörde der US Streitkräfte, ermittelt werden.
4.3.1.2. Zeitzone
Das Gerät ist nicht nur in der Lage, die exakte Position zu ermitteln, sondern verfügt auch über eine genau gehende Uhr. Aus der Position und der Zeit können dann der genaue Sonnenauf- und -untergang berechnet werden. Voraussetzung ist natürlich, dass im Gerät die richtige Zonenzeit eingestellt ist. Das Gerät ist serienmäßig auf Weltzeit, d.h. die sog. Universal Time Coordinated (UTC) eingestellt. Diese Zeit wird auch (noch) als Greenwich Mean Time (GMT) bezeichnet. In Mitteleuropa laufen die Uhren jedoch im Winter gem. Mitteleuropäischer Zeit (MEZ) und im Sommer nach Mitteleuropäischer Sommerzeit (MESZ). Die MEZ ist der UTC um eine Stunde voraus. Im Sommer wechselt Mitteleuropa auf die MESZ und der Unterschied zur UTC beträgt dann zwei Stunden.
| MEZ | UTC + 1 Std. |
| MESZ | UTC + 2 Std. |
Wenn man nicht gerade zu den wenigen Leuten gehört, die aus beruflichen Gründen mit UTC arbeiten müssen, z.B. dem Militär, so ist es in den meisten Fällen praktischer, die Einstellung im Gerät der lokalen Zeitzone anzupassen. Da der Wechsel von der Winter- zur Sommerzeit nicht weltweit einheitlich geregelt ist, vollziehen die Geräte den Wechsel auch nicht automatisch! Darauf muss im Frühjahr und Herbst jeder Nutzer selber achten.
4.3.1.4. Maßeinheiten
Das GPS-Gerät ermittelt nicht nur die Position, sondern informiert den Anwender darüber hinaus über die Geschwindigkeit, Entfernung, Höhe und bei integriertem Höhenmesser den Luftdruck. Da GPS ein amerikanisches System ist und auch die meisten Gerätehersteller dort ansässig sind, sind die voreingestellten Maßeinheiten US Einheiten, d.h. US-Landmeilen (mls) und Fuß (ft). Für europäische Nutzer und für "Sonderanwendungen", z.B. See- und Luftfahrt können die voreingestellten Maßeinheiten aber geändert werden. Folgende Maßeinheiten stehen zur Verfügung:
| Entfernung/Geschwindigkeit | Meilen (mls, mls/h) | metrisch (km, km/h) | nautisch (nm, kn) |
| Höhe | Fuß (ft) | Meter (m) | |
| Luftdruck | inches (HG) | Millibar (mbar) |
4.3.2. Position
Bevor das GPS-Gerät nach dem Einschalten eine korrekte Position anzeigen kann muss es initialisiert werden, d.h. das Gerät muss erst Signale von einer ausreichenden Anzahl Satelliten empfangen und auswerten. Moderne Geräte können bis zu 12 Satelliten gleichzeitig empfangen (12-Kanal-Geräte). Dieser Vorgang nimmt 2-3 Minuten in Anspruch. Liegt mein neuer Standort weit vom Standort der letzten Benutzung entfernt, so kann es auch länger dauern.
Die Satellitenstatusseite des Geräts gibt mir Informationen über Anzahl, Nummer, Signalstärke, sowie ungefähre Lage der zur Verfügung stehenden Satelliten. Die Lage der Satelliten in Bezug auf die Position ergibt sich aus einem Kreisdiagramm. Der äußere Kreis entspricht dem Horizont. Der innere Kreis bezeichnet ein Azimut (Höhenwinkel) von 45o. Das Zentrum des Kreises ist dann der Zenit (90o). Die Positionen der Satelliten sind mit ihren Nummern bezeichnet. Aus dem Balkendiagramm ergeben sich die Signalstärken der Satelliten. Zusätzlich wird der geschätzte Positionsfehler (estimated position error EPE) angezeigt. Dieser liegt seit dem Abschalten der künstlichen Signalverfälschung (selective availability SA) bei +/- 10 - 50 m.
Nach Auswertung der Satellitensignale wird auf der gerätespezifischen Seite die Position im gewählten Format angezeigt. Unter der Voraussetzung, dass das Kartendatum des GPS-Gerätes mit dem Datum der Landkarte übereinstimmt, kann die angezeigte Position nun ohne weiteres, z.B. mit einem Planzeiger, in die Karte übertragen werden. Das Gerät errechnet permanent die aktuelle Position. Bei Bewegung wird die angezeigte Position daher ständig aktualisiert. Zusätzlich zur Position ist das Gerät dann auch in der Lage, die Geschwindigkeit und den Kurs zu berechnen.
4.3.3. Wegpunkte
Um das GPS-Gerät nicht nur als Positionsanzeige sondern als vollwertiges Navigationsgerät nutzen zu können, muss ich das Gerät zusätzlich mit Wegpunkten (WP) versorgen. Erst die Benutzung von Wegpunkten macht es möglich, einen beliebigen Punkt im Gelände oder auf dem Wasser zielgenau anzusteuern.
Wegpunkte sind vorab oder unterwegs ermittelte und in der Wegpunktliste des Gerätes abgelegte Positionen. Bei den gängigsten Geräten können bis zu 500 Wegpunkte gespeichert werden. Die Wegpunkte werden standardmäßig mit einer Nummer versehen, können aber je nach Gerät mit 6-8 stelligen Bezeichnungen versehen werden. Die Bezeichnung sollte wiedererkennbar und sinnvoll sein, sonst verliert man bereits nach kurzer Zeit den Überblick. Jeder Wegpunkt ist zusätzlich mit einem Symbol versehen, das ebenfalls geändert werden kann. Je nach Gerät steht ein Katalog von 8-12 Symbolen zur Verfügung. Wegpunkte kann ich auf unterschiedliche Art und Weise ermitteln.
 Wir wollen unsere aktuelle Position, z.B. unser Quartier, den Anfang der Schotterpiste oder den lauschigen Platz am See als Wegpunkt speichern, so kann ich die aktuelle Position über die Funktion "Wegpunkt speichern" (mark waypoint) meiner Wegpunktliste hinzufügen. Über
die Wegpunktliste kann ich den Punkt jetzt ansehen, die Bezeichnung und die Position ändern und den Punkt aktivieren.
Wir wollen unsere aktuelle Position, z.B. unser Quartier, den Anfang der Schotterpiste oder den lauschigen Platz am See als Wegpunkt speichern, so kann ich die aktuelle Position über die Funktion "Wegpunkt speichern" (mark waypoint) meiner Wegpunktliste hinzufügen. Über
die Wegpunktliste kann ich den Punkt jetzt ansehen, die Bezeichnung und die Position ändern und den Punkt aktivieren.
Ich habe mit einem Planzeiger aus der Karte eine Koordinate entnommen. Bei komfortabler ausgestatteten Geräten kann ich die Koordinate nun direkt über eine Tastatur in den Wegpunktspeicher eingeben. Bei weniger komfortablen Geräten muss ich die aktuelle Position über die Funktion "Wegpunkt speichern" übernehmen und anschließend ändern. Über die Wegpunktliste kann ich auch diesen Punkt ansehen, Bezeichnung und Position ändern sowie den Wegpunkt aktivieren.
Bei manchen Geräten lässt sich ein Wegpunkt auch aus der Peilung und der Distanz von der derzeitigen Position ermitteln. Beide Werte entnehme ich der Karte und gebe sie ein. Das Gerät berechnet dann die Position des Wegpunktes. Bei Geräten mit einem elektronischen Kompass kann einer solcher Wegpunkt etwas einfacher durch direktes peilen am Gerät und Eingabe der Entfernung erzeugt werden. Über die Wegpunktliste kann ich diesen Punkt ansehen, die Bezeichnung und die Position ändern sowie den Wegpunkt aktivieren.
Fast alle GPS-Geräte verfügen inzwischen über eine PC-Schnittstelle. Die komfortabelste Methode ist daher sicherlich die Ermittlung von Wegpunkten mit Hilfe von elektronischen Karten am heimischen PC. Die ermittelten Wegpunkte können dann mit geeigneten Programmen in die Wegpunktliste übertragen werden (siehe 4.4. GPS und PC).
Über die Funktion "Gehe zu" (goto) wird ein Wegpunkt in der Wegpunktliste aktiviert. Das Gerät berechnet jetzt die direkte Peilung und die kürzeste Entfernung zum aktivierten Wegpunkt. Auf der Kompassseite des Gerätes weist der Zeiger die Richtung zum Ziel. Bewege ich mich, so berechnet das Gerät auf Basis der ermittelten Geschwindigkeit zusätzlich die benötigte Zeit zum und die voraussichtliche Ankunftszeit am Ziel. Auf der Kartenseite markiert eine Kurslinie den einzuschlagenden Weg.
Manche Geräte (z.B. Garmin GPS 12) verfügen zusätzlich über eine sog. Autobahnseite. Hier wird mir neben dem Kurs und der Entfernung zum Wegpunkt grafisch die seitliche Abweichung vom Kurs angezeigt. Auch wenn die Seite Autobahnseite heißt, so liegt der Nutzen dieser Funktion doch eher auf dem Wasser, z.B. beim Durchfahren eines engen Fahrwassers bei Nacht und Nebel. Da an Land die zurückgelegten Teilstrecken normalerweise erheblich kürzer sind als auf dem Wasser ist ein solches "Leitstrahlverfahren" an Land nicht notwendig. Auf dem Motorrad und auch zu Fuß habe ich diese Funktion bisher jedenfalls noch nicht vermisst.
4.3.4. Routen
Wegpunkte lassen sich zu Routen kombinieren. Eine Route besteht aus zwei oder mehr Wegpunkten. Die Route lässt sich im Routenspeicher ablegen. Sie kann mit einem Namen versehen, jederzeit geändert oder gelöscht und bei Bedarf aktiviert werden. Die Funktionsweise ist die gleiche wie bei der herkömmlichen Wegpunktnavigation. Das Leitsystem des GPS-Gerätes führt den Nutzer dann von Wegpunkt zu Wegpunkt. Die Richtung ist dabei frei wählbar.
Einfache Geräte, z.B. eTrex, können nur eine Route mit maximal 50 Wegpunkten speichern. Standard bei den meisten Garmin Geräten sind inzwischen jedoch 20 Routen mit maximal 50 Wegpunkten pro Route. Dies ist jedoch ein theoretischer Wert, da der Wegpunktspeicher ja auf maximal 500 Einträge beschränkt ist.
Auf der "Kartenseite" wird die Route grafisch dargestellt. Eine Peillinie zeigt mir die Richtung zum nächsten Wegpunkt meiner Route. Der Kartenausschnitt kann mittels "Zoomfunktion" vergrößert und verkleinert werden. Die Darstellung kann "nordorientiert" oder "kursorientiert" erfolgen. Bei den meisten Geräten wird zusätzlich ein Maßstabsbalken eingeblendet. Mit dem Signal "Kurve voraus" wird mir einige Meter vorher der nächste Wegpunkt meiner Route angekündigt. Auf der Kompassseite weist der Zeiger die Richtung zum nächsten Wegpunkt der Route. Eine Anzeige informiert mich zusätzlich über die Entfernung zum nächsten Punkt, den Sollkurs und die Gesamtlänge der Route, natürlich immer auf Basis der Luftlinie.
 Diese Funktion eignet sich sehr gut für Motorradtouren. Kritische Punkte der geplanten Route, z.B. Abzweige, Kreuzungen u.ä. ermittle ich anhand einer aussagekräftigen Karte. Die ermittelten Wegpunkte speichere ich im Wegpunktspeicher und füge sich anschließend zu einer Route zusammen. Verfüge ich
über einen PC und geeignete Software, so kann ich meine Wegpunkte und Routen komplett am PC planen, erstellen, verwalten und per Kabel in das GPS-Gerät übertragen.
Diese Funktion eignet sich sehr gut für Motorradtouren. Kritische Punkte der geplanten Route, z.B. Abzweige, Kreuzungen u.ä. ermittle ich anhand einer aussagekräftigen Karte. Die ermittelten Wegpunkte speichere ich im Wegpunktspeicher und füge sich anschließend zu einer Route zusammen. Verfüge ich
über einen PC und geeignete Software, so kann ich meine Wegpunkte und Routen komplett am PC planen, erstellen, verwalten und per Kabel in das GPS-Gerät übertragen.
4.3.5. Tracks
Die meisten GPS-Geräte speichern automatisch den zurückgelegten Weg (tracklog). Zu diesem Zweck legt das Gerät in bestimmten Intervallen Positionsdaten und Zeitinformationen als trackpoints im internen Speicher ab. Bei neueren Geräten werden auch (GPS) Höhenwerte erfasst. Bei Geräten mit integrierten barometrischen Höhenmesser, z.B. eTrex Summit, ist der Höhenwert entsprechend genauer. 
Je nach Gerätetyp können zwischen 1000 und 3000 einzelne Datenprotokolle pro tracklog gespeichert werden. Ist die Speicherkapazität erschöpft, so werden alte Daten des track-logs ohne Vorwarnung überschrieben! Je nach Gerät kann der Speicher zwischen 1500 und 3000 Datenprotokolle pro tracklog erfassen. Für eine ausgedehnte Tagestour reicht das nicht aus. Manche Geräte verfügen über eine Speicheranzeige in %.
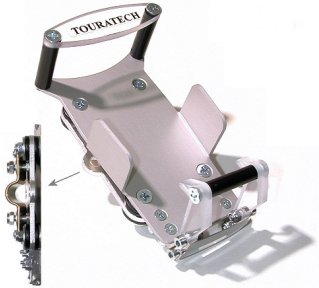
Ein tracklog kann als Track mit einem Namen versehen und abgespeichert werden. Die Anzahl der speicherbaren Tracks ist bei Garmin Geräten auf 20 begrenzt. Auf längeren Touren wird es dann schon mal eng. Eine Möglichkeit ist, das Gerät im Energiesparmodus (battery save) zu betreiben. Die Zeitintervalle zwischen den Datenprotokollen sind dann länger. Die andere Möglichkeit ist, meine track logs® extern zu speichern. Hierfür bietet sich ein sog. GPS-Tracker, z.B. von Touratech, an. Dieses Gerät ist nichts anderes als ein externer Speicher mit Platz für bis zu 80 000 Datenprotokolle und ist mit 570,- Euro ziemlich teuer. Eine andere Möglichkeit ist da der Einsatz der ebenso teuren aber vielseitiger verwendbaren PDAs.
Einen Track kann man dann unter der Funktion "tracback®" aktivieren. Auf der "Kartenseite" wird der Track grafisch dargestellt. Der Kartenausschnitt kann mittels "Zoomfunktion" vergrößert und verkleinert werden. Die Darstellung kann "nordorientiert" oder "kursorientiert" erfolgen. Bei den meisten Geräten wird zusätzlich ein Maßstabsbalken eingeblendet. Das Gerät führt mich dann auf dem gespeicherten Track zurück zum Ausgangspunkt. Die Darstellung des Tracks kann auch in Verbindung mit Wegpunkten und Routen erfolgen.
4.4. GPS und PC
Mit einem preiswerten handelsüblichen GPS-Gerät kann ich bereits eine ganze Menge anstellen. Das Erstellen und Verwalten der Wegpunkte, Routen und Tracks im GPS-Gerät wird jedoch schnell zu einer zeitraubenden und mühseligen Arbeit. Bei Hunderten von Wegpunkten verliert man auch schnell den Überblick. Und was tun wenn die Kapazität des Wegpunktspeichers erschöpft ist? Der PC wird dann zu einem praktischen Hilfsmittel.
4.4.1. PC-Schnittstelle
Fast jedes handelsübliche GPS-Gerät verfügt inzwischen über die Möglichkeit, über eine Schnittstelle mit einem geeigneten Kabel Daten mit dem PC auszutauschen. Erst diese Möglichkeit macht aus einem einfachen Positionsanzeigegerät eine vielfältig und flexibel einsetzbares Navigationsgerät. Das heißt nicht, dass man jetzt zusätzlich zum GPS auch noch einen Laptop mitführen muss. Im Wegpunktspeicher des GPS Geräts verliert man jedoch auch bei maximal (nur) 500 Wegpunkten schnell den Überblick. Speichern, verwalten, ändern ist umständlich und mühsam. Mit dem heimischen PC geht das alles sehr viel einfacher.
Über ein optional erhältliches PC-Kabel wird das Gerät über die serielle Schnittstelle (COM) mit dem PC verbunden. Das Datenformat, in dem kommuniziert wird, ist leider nicht einheitlich. Es variiert je nach verwendeter Software. Neben dem Garmin-Format "GRMN/GRMN" stehen im Interface-Menü des GPS-Geräts eine ganze Reihe weiterer Einstellungen zur Verfügung. Da Garmin inzwischen jedoch eine Marktführerschaft auf dem Outdoor-GPS-Markt eingenommen hat, etabliert sich das Garmin Format zunehmend. Nicht Outdoor spezifische EDV-Lösungen verwenden aber weiterhin andere Formate.
4.4.2. PC Software
Zum Thema GPS existieren inzwischen eine Unzahl an PC Programmen. Diese reicht von extrem teuren professionellen Anwendungen bis zu frei im Netz erhältlichen free- und shareware Programmen für die unterschiedlichsten Zwecke. Einen guten und umfassenden Überblick u.a. über GPS-PC-Programme für Outdoor-Zwecke bietet die GPS und Canadier Homepage von Ralf Schönfeld.
4.5. GPS und Motorrad
Wer sein Motorrad nicht nur zur Fahrt zur nächsten Eisdiele oder zum Heizen auf auswendig gelernten Strecken benutzt, sondern zum "erfahren" neuer Horizonte nutzen möchte, für den kann eine GPS-Gerät ein nützlicher Helfer sein. Insbesondere mit einer Reiseenduro befinde ich mich bezüglich der navigatorischen Anforderungen in einem Bereich zwischen Wanderer und Autofahrer. Natürlich ist es insbesondere in Deutschland nicht möglich, jeden beliebigen Pfad auch mit dem Motorrad zu befahren. Den Standardrouten navigationssystem- und hinweisschildgeführter Büchsentreiber möchte ich aber auch nicht folgen. Ob pictogrammunterstützte GPS-Geräte auf Basis elektronischer Karten tatsächlich zu den gesuchten "neuen" Horizonten führen, muss jeder für sich entscheiden.
 Ich bevorzuge für meine Zwecke ein einfaches kleines Gerät ohne elektronische Karte, jedoch ergänzt durch einen barometrischen Höhenmesser. Garmin bietet mit dem eTrex Summit ein solches Gerät an. Der zusätzlich vorhandene elektronische Fluxgate
Kompass lässt sich deviationsbedingt auf dem Motorrad nicht sinnvoll nutzen. Ergänzt durch eine aussagekräftige topografische Karte können sämtliche auftretenden navigatorischen Anforderungen abgedeckt werden.
Ich bevorzuge für meine Zwecke ein einfaches kleines Gerät ohne elektronische Karte, jedoch ergänzt durch einen barometrischen Höhenmesser. Garmin bietet mit dem eTrex Summit ein solches Gerät an. Der zusätzlich vorhandene elektronische Fluxgate
Kompass lässt sich deviationsbedingt auf dem Motorrad nicht sinnvoll nutzen. Ergänzt durch eine aussagekräftige topografische Karte können sämtliche auftretenden navigatorischen Anforderungen abgedeckt werden.
Als Montageort für ein GPS-Gerät bietet sich bei den meisten Motorrädern der Lenker an. Bei Endurolenker ist hierfür die Querstange gut geeignet. Die Industrie bietet verschiedene Befestigungssystem an. Für das Motorrad haben sich die Halter von Touratech und Rammount bewährt.
Da die meisten Geräte auf dem Markt für den Outdooreinsatz vorgesehen sind, sind Batterien als primäre Energiequelle vorgesehen. Über ein optional erhältliches Kabel können fast alle Geräte jedoch an eine externe Stromquelle angeschlossen werden. Beim Anschluss an das Bordnetz des Motorrads ist die Betriebsspannung des GPS-Gerätes zu beachten. Wird eine andere als 12V DC benötigt, so ist ein entsprechender Spannungswandler zwischen zu schalten.
4.6. Andere Satellitennavigationssysteme
4.6.1. Transit
 NAVSTAR GPS war nicht das erste Satellitennavigationssystem. Bereits 1958, zu Beginn des Weltraumzeitalters, begannen die USA mit der Entwicklung eines weltraumgestützten Funknavigationssystems. Projektträger war die US Navy. 1959 wurde der erste Satellit
gestartet. Aufgrund einer Raketenfehlfunktion ging der Satellit jedoch verloren. Am 19.12.1960 konnten die USA den ersten Transit Satelliten in Betrieb nehmen. Nach etlichen Raketenfehlstarts war das System schließlich 1962 voll einsatzbereit. Transit sollte hauptsächlich der im Aufbau befindlichen strategischen Polaris U-Flotte dienen. Später war aber jedes größere Kriegsschiff der USA mit
einem Transit Empfänger ausgestattet. 1967 wurde Transit für die zivile Nutzung freigegeben. Der Betrieb wurde nach 34 Jahren Dienst am 31.12.1996 eingestellt.
NAVSTAR GPS war nicht das erste Satellitennavigationssystem. Bereits 1958, zu Beginn des Weltraumzeitalters, begannen die USA mit der Entwicklung eines weltraumgestützten Funknavigationssystems. Projektträger war die US Navy. 1959 wurde der erste Satellit
gestartet. Aufgrund einer Raketenfehlfunktion ging der Satellit jedoch verloren. Am 19.12.1960 konnten die USA den ersten Transit Satelliten in Betrieb nehmen. Nach etlichen Raketenfehlstarts war das System schließlich 1962 voll einsatzbereit. Transit sollte hauptsächlich der im Aufbau befindlichen strategischen Polaris U-Flotte dienen. Später war aber jedes größere Kriegsschiff der USA mit
einem Transit Empfänger ausgestattet. 1967 wurde Transit für die zivile Nutzung freigegeben. Der Betrieb wurde nach 34 Jahren Dienst am 31.12.1996 eingestellt.
Die Funktionsweise von Transit steht in unmittelbarem Zusammenhang mit dem Start von "Sputnik" und ist eine gänzlich andere als beim GPS. Bereits wenige Tage nach dem Start des ersten künstlichen Erdtrabanten der Welt am 04.10.1957 gelang es, die Orbitalbahn des ständig funkenden Sputnik durch eine Analyse des Dopplereffekts zu ermitteln. Wie bei einem sich nähernden hupenden Auto war die Signalfrequenz des anfliegenden Sputniks höher als beim Abflug. Durch Analyse und Vergleich einzelner Frequenzunterschiede konnten Kurs und Geschwindigkeit ermittelt werden. Im Umkehrschluss wurde festgestellt, dass bei bekannter Orbitalbahn, d.h. Kurs und Geschwindigkeit eines sendenden Satteliten anhand einer Analyse des Dopplereffekts die Position des Empfängers ermittelt werden kann.
Wie das heutige GPS bestand Transit aus drei Segmenten, dem Weltraumsegment, dem Bodenkontrollsegment und dem Benutzersegment. Das Weltraumsegment bestand aus sechs Satelliten (3 aktive + 3 Reserve). Jeder Satellit bewegte sich auf einer eigenen polaren Umlaufbahn und umrundet in einer Höhe von 805 km alle 108 min die Erde. Das hatte zur Folge, dass nicht jederzeit ein Satellit über dem Horizont stand. Eine Positionsbestimmung war dann nicht möglich. Die Inklination betrug 51o.
Jeder Satellit sendet auf zwei Frequenzen: 149,99 MHz und 399,97 MHz. Dabei werden seine Orbitaldaten und präzise Zeitinformationen übertragen. Beim Überflug eines Satelliten wird die Frequenzverschiebung (Dopplereffekt) der Signale für eine Zeitdauer von 15 min gemessen. Hieraus ermittelt der Empfänger unter Berücksichtigung ionosphärischer Störungen die Position. Bei einem einzelnen Überflug konnte eine Genauigkeit von 80-100 m erzielt werden. Mehrere Überflüge erhöhten die Genauigkeit. Aufgrund der geringen Anzahl an Satelliten und der geringen Flughöhe ist nicht ständig ein Satellit verfügbar. Unter günstigen Bedingungen vergehen 35 - 100 min zwischen den einzelnen Überflügen, normalerweise noch mehr.
Das Bodenkontrollsegment bestand aus lediglich drei Bahnverfolgungsstationen und einer Leitstelle. Zentrale Leitstelle war das Naval Space Operations Center in Point Mugu, Kalifornien, zuständig für die Bahnverfolgung und Korrektur sowie die Funktionsgenauigkeit des Systems. Die Bahnverfolgungsstationen lagen in Maine, Minnesota und auf Hawaii. Transit war während seines gesamten Lebenszyklus ein rein militärisches System unter Kontrolle der US Navy.
Das Benutzersegment bestand aus den Transit Empfängern. Auch wenn diese in den 80er Jahren durch die Miniaturisierung so klein waren, dass sie auch auf Segelyachten eingebaut werden konnten, so waren sie aber nicht tragbar. Auch die Antenne fiel recht groß aus.
4.6.2. Glonass
Die Sowjetunion begann Ende der 60er Jahren mit der Planung eines neuen leistungsfähigen weltraumgestützten Navigationssystems für die Steuerung einer neuen Generation von nuklearen Interkontinentalraketen. Das bisherige Tsiklon Satellitennavigationssystem war hierfür ungeeignet. In den 70er Jahren wurde das Projekt ausgeweitet. Wie GPS sollte das neue Globalnaya Navigationnaya Sputnikovaya Sistema (dt.: Globales Navigationssatellitensystem - Glonass) jetzt die weltweite und präzise Standortbestimmung aller Land-, Luft- und Seestreitkräfte ermöglichen. Der erste Glonass-Satellit nahm 1982 den Betrieb auf. Das System hat offiziell 1993 seine volle Einsatzfähigkeit erreicht.
Glonass wird ausschließlich von den russischen Streitkräften betrieben und weiterentwickelt. Es untersteht dem Kommando der Russischen Weltraumkräfte. Von hier aus werden die gesamten militärischen Aktivitäten Russlands im All kontrolliert und gesteuert. Anders als die Amerikaner verzichteten die Russen jedoch von Anfang an auf eine künstliche Verschlechterung des Signals (selective availibility). Glonass war ursprünglich ja ausschließlich für die Benutzung durch das Militär gedacht. Der Zusammenbruch der UdSSR und die anschließende Öffnung Russlands führte 1995 aber zu der Entscheidung, Glonass auch für den zivilen Gebrauch freizugeben.
Wie GPS besteht auch Glonass aus drei Segmenten, dem Weltraumsegment, dem Bodenkontrollsegment und dem Benutzersegment. Das Weltraumsegment besteht aus 24 Satelliten (21 aktive Satelliten + 3 Reserve). Während bei GPS auf sechs Orbitalbahnen je vier Satelliten die Erde umkreisen, sind es bei Glonass nur drei Umlaufbahnen mit je sieben Satelliten plus ein Reservesatellit. Jeder Satellit umrundet in einer Höhe von 19.100 km alle 11 h 15 min die Erde. Die Inklination beträgt 64,8o (GPS 55o). Die Umlaufbahnen sind so angeordnet, dass von jedem Punkt der Erde Sichtkontakt zu 4-6 Satelliten besteht.
Jeder Satellit sendet zwei Signale. Während das hochpräzise Navigationssignal (HP) verschlüsselt ist und nur einem ausgewählten Nutzerkreis, d.h. dem Militär zur Verfügung steht, ist das normalpräzise Navigationssignal (SP) unverschlüsselt und mit frei käuflichen Geräten zu empfangen. Die Signale werden über zwei Frequenzbereiche im UHF-Bereich (L-Band) ausgestrahlt. Jeder Frequenzbereich ist unterteilt in 25 Kanäle bei einem Frequenzintervall von 0,5625 MHz. Das SP-Signal wird im Bereich L1= 1602.5625 MHz + n0.5625 MHz gesendet, das HP-Signal auf L2=1240MHz + n0.5625 MHz, wobei n die Nummer des Kanals bezeichnet. Das bedeutet, dass jeder Satellit Signale auf seiner eigenen Frequenz ausstrahlt, die sich von der anderer Satelliten unterscheidet. Der Glonass-Empfänger identifiziert den sendenden Satelliten anhand seiner Frequenz, GPS-Geräte durch lesen der empfangenen Nachricht. Während bei GPS der Satellit so durch eine softwareseitige Analyse der empfangenen Nachricht identifiziert wird, erfolgt dies bei Glonass durch eine hardwareorientierte Lösung. Einige Satelliten senden auf identischen Frequenzen. Diese Satelliten sind in antipodischen Slots der Umlaufebenen platziert und erscheinen nicht zur gleichen Zeit im Sichtbereich des Nutzers.
Der Bodenkontrollkomplex besteht aus mehreren Bodenstationen, die die Bahndaten der Satelliten überwachen und Korrekturdaten an die Satelliten übertragen. Die Stationen befinden sich alle auf russischem Territorium. Hierbei handelt sich um die Hauptkontrollstation in Moskau sowie Telemetriestationen in St. Petersburg, Ternopol, Eniseisk und Komsomolsk-na-Amure.
Das Benutzersegment sind die Endgeräte, d.h. die Glonass-Empfänger. Hierbei handelt es sich um reine Empfangsgeräte, die aus den vom Satelliten ausgestrahlten Signalen (Bahndaten, Uhrzeit, Zahlensequenz) ständig und an jedem Ort ihre momentane Position errechnen. Glonass-Geräte berechnen die Position auf Basis des Soviet Geodetic System 1985 (SGS85) und nicht auf Basis des WGS84. Reine Glonass Geräte sind nach meinen Erkenntnissen für Normalverbraucher nur schwer erhältlich und preislich unattraktiv. Technisch interessant sind kombinierte GPS-Glonass-Geräte. Die Genauigkeit lässt sich durch die Kombination erheblich verbessern. Genutzt werden solche Geräte hauptsächlich von Geodäten.
Aufgrund der kurzen Lebensdauer der bisherigen Glonass-Satelliten von nur 3-5 Jahren und der chronischen Mittelknappheit der russischen Streitkräfte ist Glonass derzeit (2002) nur eingeschränkt betriebsbereit. Inzwischen wurde jedoch ein Modernisierungsprogramm verabschiedet. Das Programm sieht den Bau einer neuen Serie von Satelliten vor. Die Glonass-M Satelliten werden nicht nur leichter sein, sondern sollen auch 5-8 Jahre lang fehlerfrei arbeiten. Die M-Satelliten sollen bis 2004 auf ihren Umlaufbahnen sein. Danach sollen die Glonass-K Satelliten der dritten Generation mit einer Lebensdauer von 10 Jahren folgen.
4.6.3. Galileo
 Unter der Bezeichnung Galileo plant die Europäische Union (EU) seit 1995 den Aufbau eines eigenen, rein zivilen Satellitennavigationssystems. Galileo wird das erste zivile Satellitennavigationssystem der Welt sein. Der Start des ersten Satelliten an Bord einer Ariane V vom
europäischen Weltraumbahnhof Kourou in Französisch Guayana ist für 2004 vorgesehen. 2006 soll der erste Betrieb (IOC) aufgenommen werden und 2008 soll das gesamte System dann voll einsatzbereit (FOC) sein. Angesichts unsicherer Finanzierung und ungeklärter technischer Details ist der Zeitplan als vorläufig zu betrachten. Die Gesamtkosten für Galileo werden auf 3,2 Milliarden Euro
veranschlagt.
Unter der Bezeichnung Galileo plant die Europäische Union (EU) seit 1995 den Aufbau eines eigenen, rein zivilen Satellitennavigationssystems. Galileo wird das erste zivile Satellitennavigationssystem der Welt sein. Der Start des ersten Satelliten an Bord einer Ariane V vom
europäischen Weltraumbahnhof Kourou in Französisch Guayana ist für 2004 vorgesehen. 2006 soll der erste Betrieb (IOC) aufgenommen werden und 2008 soll das gesamte System dann voll einsatzbereit (FOC) sein. Angesichts unsicherer Finanzierung und ungeklärter technischer Details ist der Zeitplan als vorläufig zu betrachten. Die Gesamtkosten für Galileo werden auf 3,2 Milliarden Euro
veranschlagt.
Wie GPS und Glonass wird auch Galileo aus drei Segmenten, dem Weltraumsegment, dem Kontrollsegment und dem Benutzersegment bestehen. Das Weltraumsegment wird aus 30 Satelliten (27 aktive + 3 Reserve) bestehen. Die Satelliten werden in einem sog. Medium Earth Orbit (MEO) in ca. 24 000 km Höhe die Erde umkreisen. Die Inklination wird zwischen 55o und 60o betragen, um eine ausreichende Abdeckung bis 75oN zu erzielen. Das System soll bei Bedarf durch weitere Satelliten auf einer geostationären Umlaufbahn (GEO) in 36 000 km Höhe ergänzt werden. Die geostationären Satelliten werden vermutlich der Kommunikation zwischen den Bodenstationen und den MEO-Satelliten dienen. Die Zahl der Bodenstationen kann so geringer gehalten werden.
Jeder Galileo Satellit soll auf vier verschiedenen Frequenzen im UHF-Bereich (L-Band) senden:
| E5a (L5) | 1176,45 MHz |
| E5b | 1196 - 1207,14 MHz * |
| E6 | 1278,75 MHz |
| E2-L1-E1 | 1575,42 MHz |
* Über die genaue E5b Frequenz wurde noch nicht entschieden.
Über diese vier Frequenzen werden vier verschiedene Dienste zur Verfügung gestellt:
Der Open Service (OS) liefert unverschlüsselte Navigations- und Zeitinformationen auf den Frequenzen E5a, E5b und E2-L1-E1. Dieser Dienst soll kostenfrei mit herkömmlichen Galileo-Geräten zu empfangen sein.
| Der Safety-of-Life Service (SAS) benutzt die auf E5a, E5b und E2-L1-E1 gesendeten Informationen des OS-Dienstes. Die Daten sind nicht verschlüsselt. Worin der Unterschied zwischen OS und SAS besteht ist mir unklar.
| Der Commercial Service (CS) versorgt den Nutzer mit den OS Navigations- und Zeitinformationen. Zusätzlich werden jedoch CS spezifische verschlüsselte Daten auf E5b und E6 übertragen. Dieser Dienst wird kostenpflichtig sein.
| Der Public Regulated Service (PRS) verwendet PRS spezifische verschlüsselte Navigations- und Zeitinformationen, die über die E6 und E2-L1-E1 Frequenzen ausgestrahlt werden. Dieser Dienst wird nur einem von staatlicher Seite kontrolliertem Nutzerkreis zur Verfügung stehen. | |
 E2-L1-E1 und E5a sind identisch mit den Frequenzen L1 und L5 der GPS Satelliten. Galileo arbeitet bei diesen beiden Frequenzen im selben Hauptband wie GPS, aber in unterschiedlichen Seitenbändern. Die E5a Frequenz ist zur Zeit (Februar 2002) noch Gegenstand von Auseinandersetzungen mit der
US-Administration. Der angebliche Grund sind mögliche Störungen der L5 Frequenz der (zukünftigen) GPS III Satelliten durch Galileo Ausstrahlungen auf E5a. Auf L5 wird der für die US Streitkräfte wichtige M-Code gesendet. Gemäß internationalen ITU-Richtlinien stört Galileo die GPS-Signale geringer als 0.25 dB, wäre also erlaubt. Der wahre Grund dürfte eher der Schutz des US-Monopols auf
den Satellitennavigationsmarkt sein.
E2-L1-E1 und E5a sind identisch mit den Frequenzen L1 und L5 der GPS Satelliten. Galileo arbeitet bei diesen beiden Frequenzen im selben Hauptband wie GPS, aber in unterschiedlichen Seitenbändern. Die E5a Frequenz ist zur Zeit (Februar 2002) noch Gegenstand von Auseinandersetzungen mit der
US-Administration. Der angebliche Grund sind mögliche Störungen der L5 Frequenz der (zukünftigen) GPS III Satelliten durch Galileo Ausstrahlungen auf E5a. Auf L5 wird der für die US Streitkräfte wichtige M-Code gesendet. Gemäß internationalen ITU-Richtlinien stört Galileo die GPS-Signale geringer als 0.25 dB, wäre also erlaubt. Der wahre Grund dürfte eher der Schutz des US-Monopols auf
den Satellitennavigationsmarkt sein.
 Bodenstationen rund um den Globus werden die Satelliten überwachen. Über ein Kommunikationnetzwerk sind alle Bodenstationen mit der zentralen Kontrollstelle in Europa, dem European Space Operations Centre (ESOC) in Darmstadt verbunden. Von dort werden die Bahnen der
Satelliten gegebenenfalls korrigiert bzw. Updates der Informationsdaten des Satelliten durchgeführt.
Bodenstationen rund um den Globus werden die Satelliten überwachen. Über ein Kommunikationnetzwerk sind alle Bodenstationen mit der zentralen Kontrollstelle in Europa, dem European Space Operations Centre (ESOC) in Darmstadt verbunden. Von dort werden die Bahnen der
Satelliten gegebenenfalls korrigiert bzw. Updates der Informationsdaten des Satelliten durchgeführt.
Das Benutzersegment sind die Endgeräte, d.h. die Galileo-Empfänger. Hierbei handelt es sich um reine Empfangsgeräte, die aus den vom Satelliten ausgestrahlten Signalen (Bahndaten, Uhrzeit, Zahlensequenz) ständig und an jedem Ort ihre momentane Position errechnen. Galileo-Geräte werden die Position vermutlich auf Basis des European Terrestial Reference System 1989 (ETRS89) und nicht auf Basis des WGS84 berechnen. Für den Normalnutzer sind die Unterschiede aber gleich Null. Im Rahmen des Global Navigation Satellite Systems (GNSS) sind Hybrid-Empfänger vorgesehen, die sowohl GPS- als auch Galileo-Signale empfangen und so die Position wesentlich genauer ermitteln können. Dies ist auch der Grund weshalb Galileo wie GPS auch auf den L1 und L5 Frequenzen senden wird.
![]()
![]()
![]()